General specifications
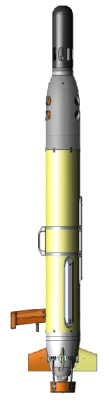 |
The vehicles are based on the Oceanserver Iver2-580-EP35 model with the following common specifications:
- Shape: Tubular – torpedo.
- Size: 140 x 15 cm
- Weight (in air): 21 kg + sensors
- Maximum operating depth: 100 m (in standard configuration).
- Autonomy: 8+ hours (600 W/h batt) at 2 knots.
- Communications: WiFi.
- Navigation: GPS, DVL.
- Processors: 2 x CPUs based on Atom processor (one dedicated to future expansions with 8 USB ports and 16 serial ports), including API for interface with the main processor.
- Memory: 2 x solid state hard drives (60Gb)
- Ports: 3 Ports accessible in the hull to install additional instrumentation and interior space for 3 PC-104 boards
- Operability: Launch and recovery by a single man from small boats or coast.
- Security: Safety airbag
Both vehicles have the capacity to incorporate additional sensors
|
Image / Development Configuration
This vehicle is intended for the integration and testing of new developments as well as the realization of missions with cameras and sidescan sonar
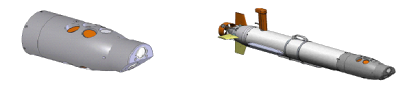
- Sensors: ADCP / DVL (4 beams (down) / 1 altimeter), Image / video cameras with LED, Sidescan Sonar (330 / 800Khz)
- Communications: WiFi
- Navigation: GPS (WAAS )
Ecomapper Configuration
Vehicle for the control of water quality. High resolution sampling in shallow waters (coastal and inland)
| |
- Sensors: YSI 6600 multiparameter sensor: Conductivity, Depth, Temperature, Dissolved Oxygen, Chlorophyll, pH / ORP, Turbidity, ADCP / DVL (up / down / altimeter)
- Communications: WiFi
- Navigation: GPS (EGNOS/WAAS)
- Maximum depth: 200 m.
|




